 平台热线
平台热线



喷漆作业的工作环境十分恶劣,油漆对人体危害很大。因此,为保护工人的身体健康,提高喷漆质量,提高劳动生产率等,应实现喷漆自动化。而目前国外的喷漆机器人,功能非常强大,造价相当昂贵,仅在我国个别实力雄厚的大型企业,要求喷漆质量很高且品种多的产品中有用武之地。在我国众多生产家具、家用电器、小型机械设备等产品的中小企业中,喷漆这种单调、重复的工作仍多采用人工方式。恶劣的环境对工人的身体造成严重危害,很难提高喷漆质量。
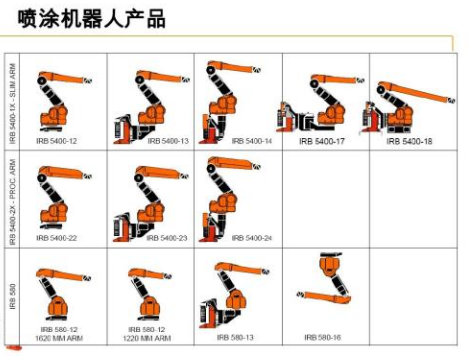
ABB喷涂机器人系列
综述国内外喷漆机器人的发展状况及研究方向,分析我国发展经济型喷漆机器人的必要性;阐述机器人设计的特点,从机构学角度出发,研究机器人机械臂和手腕的构形,采用一种差速手腕结构,设计经济型喷漆机器人本体结构,并对其结构特点进行分析;建立机器人连杆变换矩阵,并推导和验证机器人运动学正逆解;结合机器的机械结构,分析机器人各关节的运动范围,研究并给出机器人的工作空间;介绍机器人轨迹规划中的关节空间和直角坐标空间轨迹规划原理和几种关节空间轨迹插值方法。
重点研究直角坐标空间连续路径直接轨迹规划问题。利用弗莱纳-雪列三矢量关于连续空间路径曲线方向的表示法,探索出一种直角坐标空间的直接连续轨迹规划方法,并对几种常见机器人轨迹进行详细轨迹规划;考虑到该经济型喷漆机器人的功能及其经济性,控制系统采用主从分布式控制结构,重点研究机器人单关节的伺服控制系统。搭建一个机器人单关节伺服驱动系统实验平台,并对伺服系统的特性进行分析。设计了经济型喷漆机器人本体结构,分析了机器人运动学,对其进行了轨迹规划,发现了机器人的单关节伺服控制系统并进行实验。
来源:网络(侵 删)
了解更多请点击:ABB机器人
