 平台热线
平台热线



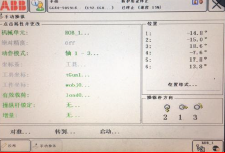
1、手动模式下,将机器人的1-6轴摇到机械零位,机器人1-6
轴度数为0.0°,如下图所示
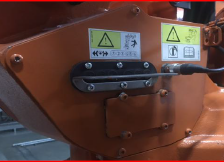
2、机器人控制柜断电,将机器人2轴处的焊枪编码线拆除,
使用梅花六角将护板的5个固定螺栓拆除,如下图所示
3、使用一字螺丝刀将两接头的固定螺栓拆掉,取下接头,使
用活口扳手将支架锁母拆除,取下SMB板,如下图所示

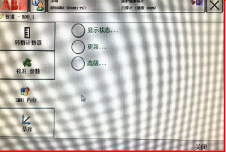
4、将SMB板拆除并安装SMB板后,上电启动系统;
按“ABB菜单”-->“校准”-->“T_ROB”-->“SMB内
存”操作,如下图所示
5、若更换的SMB板为新板,选择“更新”,然后选择“替换
SMB板数据,如下图
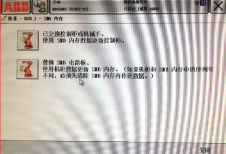
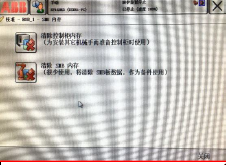
6、若更换的SMB板为使用过的旧板,选择“高级”-->“消
除SMB板内存”,然后“更新”--“替换SMB板数据”如下图所示
7、SMB板数据更新完毕,对机器人零点进行校准,选择“转
轴计数器”,点击“更新转轴计数器”
本文摘取网络(侵 删)
